LibreOffice活用講座
創造するコンテンツと技術習得を重視しよう
創造するコンテンツと技術習得を重視しよう
その3−プロセスのステップ応答とインパルス応答モデル
まず、むだ時間+一次遅れの簡単なステップ応答モデルを考えてみましょう。
無駄時間+一次遅れのプロセスは、以下の伝達関数で表現できます。
 (7)
(7)
ここで、各記号は以下のとおりです。
Y(s) : プロセスの応答(7)式は、伝達関数表現で、これではピンと来ないので、ステップ応答を時間ドメインに変換して表すと下 記のようになります。
KP : 操作出力に対するプロセスのゲイン
T : プロセス応答の時定数
L : むだ時間
 (8)
(8)これも、デジタル制御計算のため、時間を無次元化してみます。
さきほどと同様に制御周期をδとし、時間に関するパラメータを無次元化します。
 ,
,
 ,
,

すると、(8)式は
 (9)
(9)(8)式を表すと例として図1や図2のようになります。
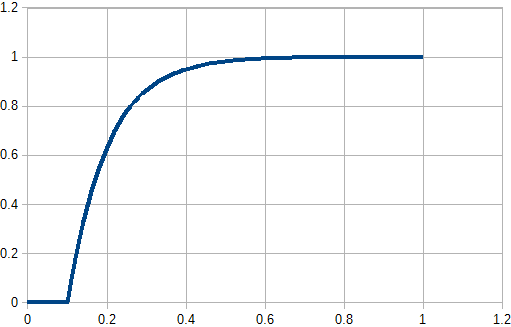
図1 一次遅れ+無駄時間のステップ応答例 (L=0.1, T=1, KP=1)
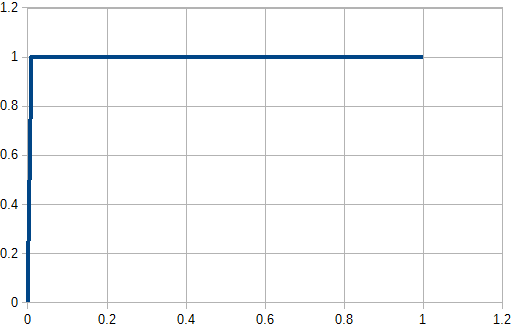
図2 時間遅れがなく時定数が短い一次遅れのステップ応答例 (T=0.000001, L=0, KPP=1)
図1は、よくある形の応答で、この場合には、コントローラが操作しても、プロセスの応答が遅れるので、『操作したのに変わらない』という状態になります。
変化が出ないからといって出力を上げると行き過ぎてしまいます。
そして行き過ぎを補正するために出力を下げると、今後は反対側に行き過ぎるということが起こります。
図2の場合は、プロセスが速やかに応答し、『操作した結果が直ちに反映される』ので、操作が容易です。
このようなプロセスの特性に合わせて、PIDのパラメータ(K, TI, TD)を変えるのがパラメータチューニングです。
制御出力値変化分(操作量)は(5)式で計算できるので、これにプロセスのモデルを組込めば、シミュレーションすることができます。
このシミュレーションにおいてプロセスには、ステップ応答モデルを使用します。
計算途中で、インパルス応答モデルを使用し、インパルス応答を積分することで、ステップ応答に形式を表現しています。
ステップ応答は、インパルス応答を連続して無限に続けたものと同じです。
ここでは、スプレッドシートを用いて計算するため、プロセスは離散化して表現します。
インパルス応答の厳密式は、離散化では表現できませんが、あくまでも可能な限りの近似式を用いて、離散化します。
離散化したインパルス応答は、ステップ応答の重ね合せとして表現します。
図3において、インパルス応答は黄色のラインになります。
時刻0では入力が0、時刻1に入力を1とし、時刻2以降の入力は0となります。
(9)式のステップ応答の式から、インパルス応答は直接的には表現できないので、
図3のように、時刻2において、-1のステップ入力(赤線」)を加え、2つのステップを重ね合わせると、インパルス入力(黄線)になります。
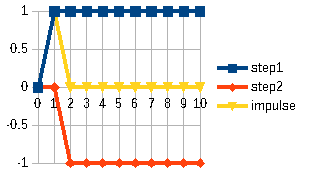
図3 ステップ入力の重合せによるインパルス入力
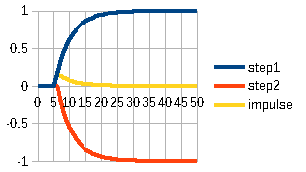
図4 ステップ応答の重合せによるインパルス応答
図4から、インパルス応答にもゲイン情報が含まれていることはわかりますが、
実際に、プラント試験でインパルス応答が得られたとしても、そこからゲイン情報を導くのは実用的ではなく、
ステップテストの結果からゲイン情報とインパルス応答を導くのが実用的です。
下記に、この一次遅れ+無駄時間の応答モデルでの、応答の式を記します。
ステップ応答1
 (10-1)
(10-1)ステップ応答2
 (10-2)
(10-2)インパルス応答
 (11)
(11) 無次元化された時定数T*を5、無次元化された時間遅れL*を5とした場合の、ステップ応答とインパルス応答を図4に示しました。
図4は、プロセスゲインKP=1のプロセスに単位ステップを入力し、その1ステップ後にマイナスの単位ステップを入力したものです。
その差がインパルス入力となります。
無駄時間が5ステップのプロセスとしたので、5ステップのむだ時間の後にステップ応答が始まっています。
インパルス応答の黄線は、最初は青線のstep1に重なっていますが、6ステップ以降は、見えています。
<前のページに戻る| 次を読む| インデックスに戻る>