LibreOffice活用講座
創造するコンテンツと技術習得を重視しよう
創造するコンテンツと技術習得を重視しよう
PID制御のシミュレーション その1-制御出力式の差分形
前ステップからの制御出力の差分を知りたいので、(2)式を後退差分法で表現します。
 (3)
(3)
実際には、制御誤差を修正するために、マイナスを掛けて加えるので、出力の計算値は下記のようになります。
 (4)
(4)
ここで、出力値の変化量を とすると、PID制御の操作量の変化分は、次式のようになります。
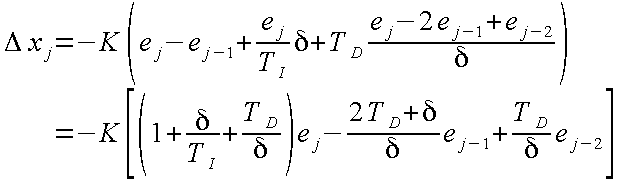 (5)
(5)
こうすることで、出力変化分が表現できました。ちなみに、差分の式を違うものにすれば、別な形になりますが、
実用上はあまり差がない場合が多いでしょう。
PID制御出力は、積分を使った定義式からは、出力を直接計算できませんが、
上記のように、一階時間微分すれば、前回の出力値からの変化分を計算できます。
制御出力は、その絶対値ではなく、前回値からの変化分が常に重要であることに注意しましょう。
ここでは、TIとTDを下記のように無次元化します。
<前のページに戻る| 次を読む| インデックスに戻る>