創造するコンテンツと技術習得を重視しよう
PID制御のシミュレーション
ここでは、CALCを使用して、PID制御の出力を実際に計算することで、シミュレーションしたいと思います。
実際に現場で制御に携わっていても、PID制御を実装できる人は案外すくないかもしれません。
人は、知っているつもりでも意外に知らないことが多いものです。
もちろん私もそうした知らない人の一人ですが、なぜ、PIDがあまり理解されていないというのか、
書いてみたいと思います。
PID制御出力の計算式は、教科書には次式のように記述されています。
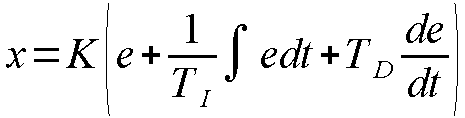 (1)
(1)
ただし、
x : OP (制御の出力値、通常0 - 100%)
e : PV-SP(実測値(PV)の目的値(SP)からの誤差)
TI : 積分時間
TD : 微分時間
この式には、落とし穴があります。式を見て、『これでは計算できないよ』と思えば、それが正しい理解です。
何故か。
式の右辺第二項に『不定積分』が含まれています。
不定積分は、数値として定まらないから不定なので、その名のとおり、この式によって
出力値を定めることができません。
定めるには、積分区間を定義して、『定積分』とすることが必要です。
しかし、積分区間をどうとったら良いのでしょうか?
私が購入した書籍のひとつにその答が記載されていました。答と云ってもヒントだけですが。
その答とは、制御出力を時間で微分することです。
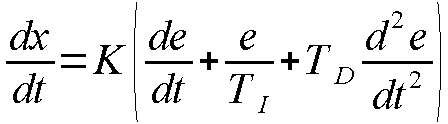 (2)
(2)
こうすることで、不定積分が無くなるので、数値として計算が可能になりました。
比例制御だけでは、偏差がでてしまうということが(2)式からわかりますね。
また、偏差をなくすのに、積分制御が必要ということが、(2)式で明確になりました。
ここではデジタル制御をシミュレーションするので、制御周期をδとして、制御出力値を計算してみます。
計算で数値を確定できるのでシミュレーションが可能です。
表計算ソフトのマクロを使わずにシミュレーションできるとは意外だと思われるかもしれませんが、
表計算ソフトは、微分方程式モデルのシミュレーション計算に力を発揮します。
以下、一通り目を通して頂ければ、Calc活用の一助になると思います。
<インデックスに戻る| 次を読む>